Post Template
This block is a brief introduction of your project. You can put your abstract here or any headers you want the readers to know.
- Main Content
- Basic Syntax
- Reference
- Data Rich and Physics Certain
- Data Rich and Physics Uncertain
- Data Starvation and Physics Uncertain
Main Content
Your article starts here. You can refer to the source code of lil’s blogs for article structure ideas or Markdown syntax. We’ve provided a sample post from Lilian Weng and you can find the source code here
Basic Syntax
Image
Please create a folder with the name of your team id under /assets/images/, put all your images into the folder and reference the images in your main content.
You can add an image to your survey like this:
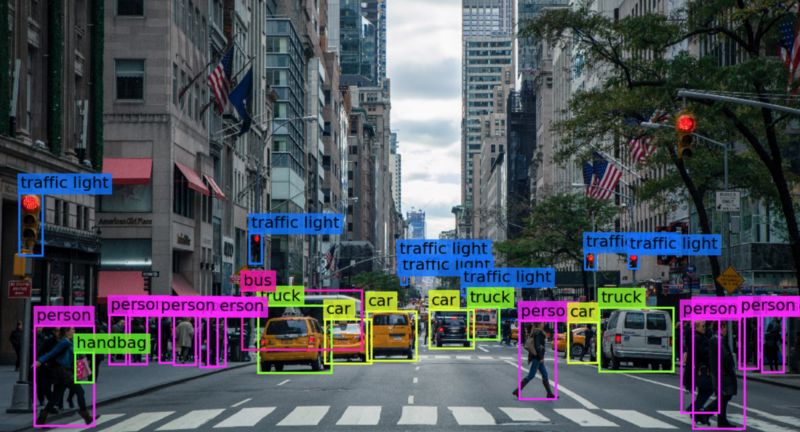
Fig 1. YOLO: An object detection method in computer vision [1].
Please cite the image if it is taken from other people’s work.
Table
Here is an example for creating tables, including alignment syntax.
| column 1 | column 2 | |
|---|---|---|
| row1 | Text | Text |
| row2 | Text | Text |
Code Block
# This is a sample code block
import torch
print (torch.__version__)
Formula
Please use latex to generate formulas, such as:
\[\tilde{\mathbf{z}}^{(t)}_i = \frac{\alpha \tilde{\mathbf{z}}^{(t-1)}_i + (1-\alpha) \mathbf{z}_i}{1-\alpha^t}\]or you can write in-text formula \(y = wx + b\).
More Markdown Syntax
You can find more Markdown syntax at this page.
Reference
Please make sure to cite properly in your work, for example:
[1] Dwibedi, Debidatta, et al. “Counting out time: Class agnostic video repetition counting in the wild.” Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020.
[2]
Data Rich and Physics Certain
| Experiment | Parameters | Results | Comments |
|---|---|---|---|
| DL + Data |
| Predicting only velocity | Dataset size : 10000 Network : 2->5->5->1 activation: ReLU |
~100% accurate | Generalises well over various initial velocities |
| Predicting only displacement | Dataset size : 10000 Network : 2->16->16->1 activation: ReLU |
Reasonable | Better prediction for $u_0 \in dataset$, average prediction outside |
| Predicting both $v_t, s_t$ | Dataset size : 10000 Network : 2->16->16->2 activation: tanh |
Reasonable | Better prediction for $u_0 \in dataset$, poor prediction outside |
| DL + Physics | |||
| Predicting both $v_t, s_t$, using Loss $L_{physics} = |v_{predicted}^2-u_{initial}^2-2gs_{predicted}|$ | Dataset size : 10000 Network : 2->16->16->1 activation: ReLU |
~0% accuracy | Expected result as no supervision of any kind is provided |
| Predicting both $v_t, s_t$, using Loss $L_{velocity+phy} = (v_{predicted}-v_{actual})^2+\gamma(v_{predicted}^2-u_{initial}^2-2g*s_{predicted})^2$ | Dataset size : 10000 Network : 2->16->16->1 activation: ReLU |
Reasonable | Prediction of $v_t$ is good. Was able to learn $s_t$ reasonably well without direct supervision |
| Predicting both $v_t, s_t$, using Loss $L_{supervised+phy} = (v_{predicted}-v_{actual})^2+(s_{predicted}-s_{actual})^2+\gamma(v_{predicted}^2-u_{initial}^2-2g*s_{predicted})^2$ | Dataset size : 10000 Network : 2->16->16->1 activation: ReLU |
Reasonable | Not a better result w.r.t direct supervision |
Observations :
- Physics equations are certain in this case and are the best to use.
- Both DL, Hybrid(DL+Physics) methods performance are equivalent (actual accuracy/loss varies based on fine training, random dataset generation)
Re running the above experiments with Dataset size of 200(Data Starvation), yielded the following observations
- DL performance is comparable with 10000 dataset when trained on much mode epochs(5x)
- Hybrid(DL+Physics) without direct supervision on $s_t$ has comparable/better closeness than DL only method for limited epochs($\sim$300) training.
Data Rich and Physics Uncertain
| Experiment | Parameters | Results | Comments |
|---|---|---|---|
| DL + Data | \ | ||
| Predicting both $v_t, s_t$ | Dataset size : 10000 Network : 2->16->16->2 activation: tanh |
Reasonable | Better prediction for $u_0 \in dataset$, poor prediction outside |
| DL + Physics | |||
| Predicting both $v_t, s_t$ using Loss $L_{physics} = |v_{predicted}^2-u_{initial}^2-2gs_{predicted}|$ |
Dataset size : 10000 Network : 2->16->16->1 activation: ReLU |
~0% accuracy | Expected result as no supervision of any kind is provided |
| Predicting both $v_t, s_t$ using Loss $L_{velocity+phy} = (v_{predicted}-v_{actual})^2+\gamma(v_{predicted}^2-u_{initial}^2-2g*s_{predicted})^2$ |
Dataset size : 10000 Network : 2->16->16->1 activation: ReLU |
Reasonable | Prediction of $v_t$ is good. Was able to learn $s_t$ reasonably well without direct supervision |
| Predicting both $v_t, s_t$ using Loss $L_{supervised+phy} = (v_{predicted}-v_{actual})^2+(s_{predicted}-s_{actual})^2+\gamma(v_{predicted}^2-u_{initial}^2-2g*s_{predicted})^2$ |
Dataset size : 10000 Network : 2->16->16->1 activation: ReLU |
Reasonable | Not a better result w.r.t direct supervision, but bettr than DL when $u0$ is out of dataset |
Observations :
- Both DL, Hybrid(DL+Physics) methods performance are similar, Hybrid(DL+Physics) is better when $u0$ is out of dataset, DL is better for $u0$ in dataset.
- Physics equations are not certain in this case and the above methods are better to use than Physics.
Data Starvation and Physics Uncertain
- Similar observations as in data rich